
NASA MINDS was the first project (in a long time for me) where I was able to put my engineering and design abilities to test with my team, the Luna-tics.
Our Problem - Swarming Robotics#
The goal of this project was to build a swarm of drones that could work together and self-communicate for transportation based-tasks. The idea we had was that if one drone was assigned to bring a payload (already on a wheeled transportation base) from one location to another, the drone would be able to accomplish this task without human intervention. If the drone was unable to tow the payload, it would be able to communicate with the other drones to get assistance for the transportation task.
I quickly learned after we began planning, that this goal was much larger than we originally thought, especially considering our teams overall comfort level with mechanical and electrical design. Our focused switched from a project that was “build robots to transport from one location to another”, into a project of “lets see if we can just get them to work in sync.”
A lesson learned in project planning#
NASA MINDS is setup as a two semester project. The first semester for planning, where we select from the assortment of spec sheets made available. Our group has chosen the Swarming Robotics spec, and we had a lot of brainstorming sessions that helped us come up with our final project idea. Yet, because of our teams discomfort with the building, we had to severely scale back from what we originally planned.
The goals we had to cut from our actual build plan were:
- A shared task list for the drones to coordinate their actions with.
- A web-tool to communicate with the drones and coordinate their actions.
- Building sample payloads for the drones to transport.
- A latching mechanism to lock the payloads in place.
You’re probably wondering, “Without those, what is left with the project?”
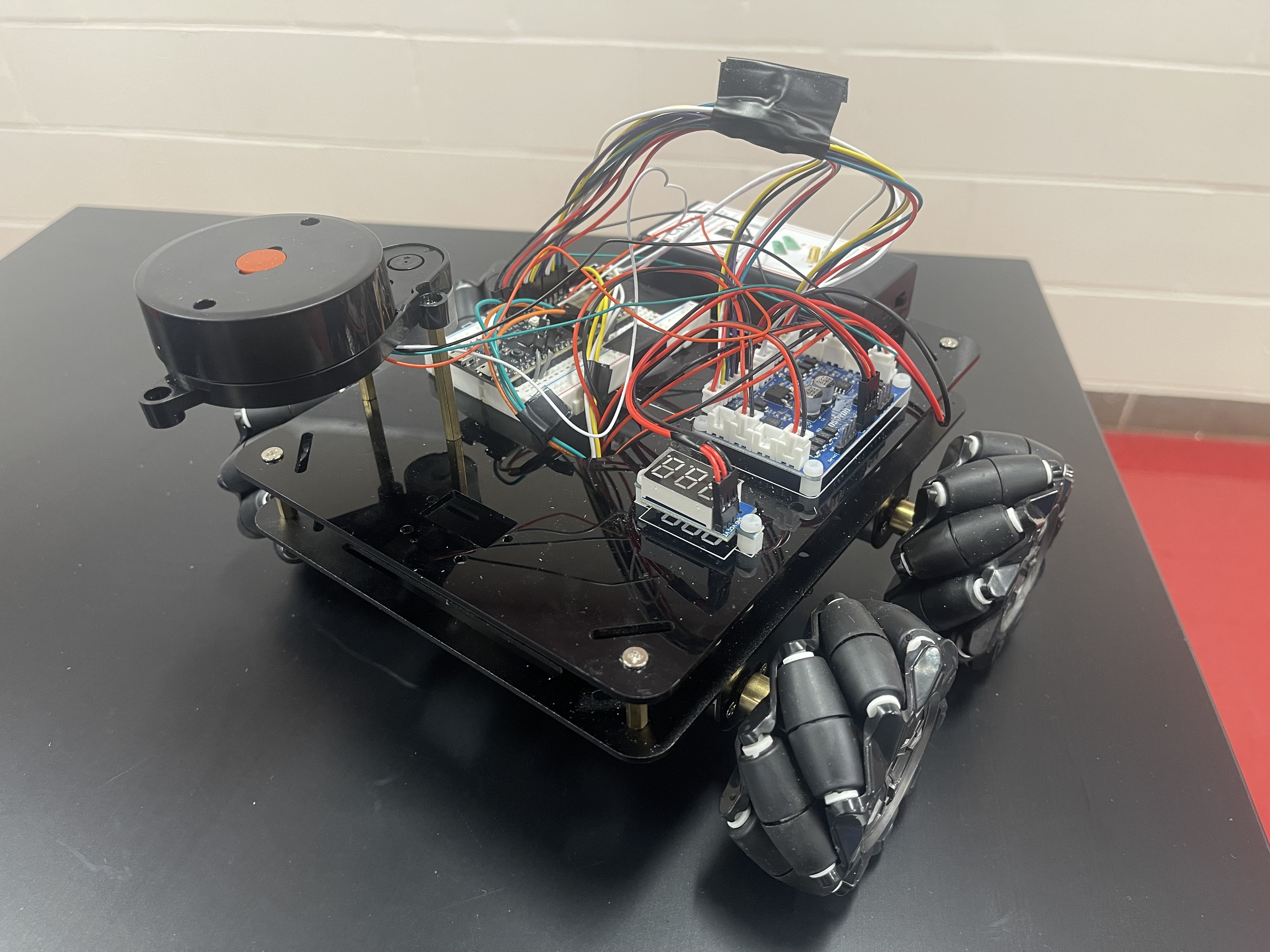
To be honest, not much! Luckily, we were able to find a way to get a single drone to move around. We didn’t choose the best tool for this job, and the ESP32-S3 microcontrollers were the best for this job, and we ended up accidentally destroying two of the microcontrollers.
The Final Product#
While having a demonstration of the drones working together was our goal the final technical documentation with all the details of how we intended for the drones to work together, was more important for this project and for the final scoring of this project.